No hay que ser astronauta para quedar atrapado en la arena. Cualquiera que haya intentado sacar un coche de la playa o de un terreno blando sabe lo frustrante que es cuando las ruedas giran y no avanzan. Piensa en otra cosa: lo difícil que es llevar un carrito de bebé por la arena. Ahora imagina que ese atasco ocurre a 384.000 kilómetros de distancia, sobre un terreno polvoriento, sin posibilidad de pedir ayuda. Eso le ocurrió al rover Spirit en Marte. Se quedó encajado para siempre. Aquel percance no solo fue un problema operativo, sino el síntoma de algo más profundo: estábamos midiendo mal.
Durante décadas, las agencias espaciales prepararon sus vehículos de exploración probándolos en condiciones terrestres “ajustadas” para simular la gravedad lunar o marciana. Para imitar la gravedad reducida, se construían versiones más ligeras del rover y se ponían a prueba sobre suelos arenosos. Pero un nuevo estudio demuestra que este enfoque contenía un fallo de concepto. No se tuvo en cuenta que la arena también se comporta de forma distinta según la gravedad. El error, aunque sutil, ha condicionado la manera en que diseñamos y preparamos misiones espaciales.
El error que nadie vio: reducir masa no es suficiente
Uno de los procedimientos estándar más extendidos consistía en construir un prototipo del vehículo con una sexta parte de su masa original, para simular cómo se movería sobre la Luna, donde la gravedad es seis veces menor que en la Tierra. Luego, se probaba este modelo ligero en suelos arenosos, observando cómo rodaba y cuánta tracción tenía.
Pero el equipo dirigido por Dan Negrut, ingeniero de la Universidad de Wisconsin-Madison, descubrió que este método no era físicamente consistente. La clave está en que no solo el vehículo siente la gravedad: el suelo también lo hace. En palabras del propio estudio: “se asumía que la tracción sería comparable bajo diferentes gravedades si se igualaba el índice de penetración del terreno”. Es decir, que bastaba con usar un terreno parecido y ajustar el peso del rover. Pero eso no es así.
El terreno bajo gravedad terrestre es más compacto y ofrece mayor resistencia. Por eso, cuando se reduce el peso del vehículo pero se mantiene la misma arena, el suelo se comporta como si fuera más firme de lo que realmente es en la Luna o Marte. El resultado es una ilusión de movilidad: parece que el rover funciona bien, pero solo porque el terreno es engañosamente sólido.

Simulaciones para desmontar un mito
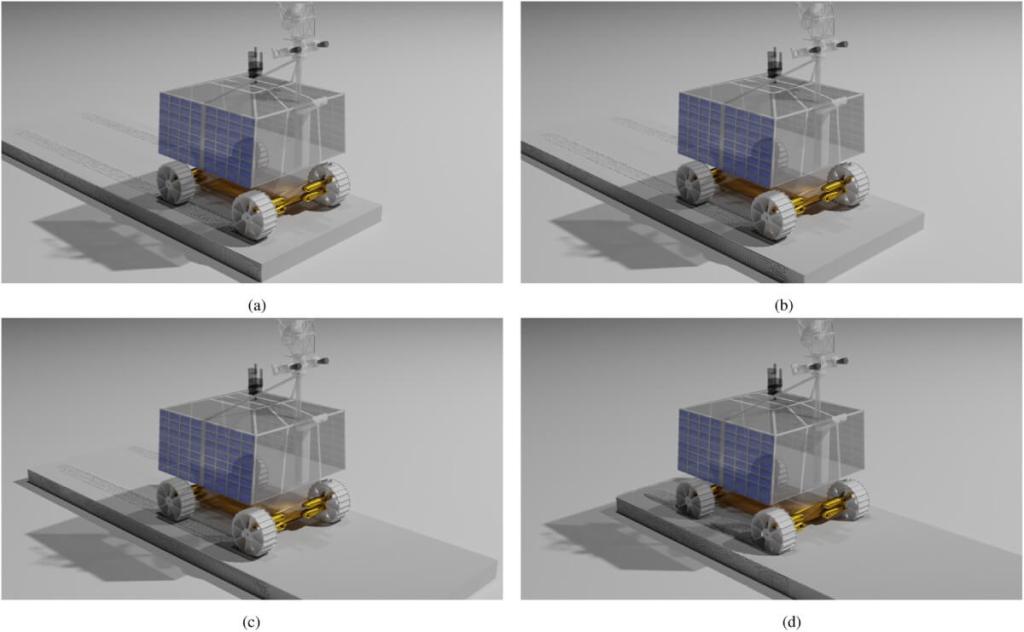
Para verificar esta hipótesis, los investigadores utilizaron Project Chrono, un motor de simulación física de código abierto que permite modelar con precisión interacciones complejas entre vehículos y suelos deformables. Simularon tanto ruedas sueltas como rovers completos, en condiciones de gravedad terrestre y lunar, sobre suelos simulados con distintas densidades y ángulos de fricción.
Las diferencias fueron claras. Los vehículos rendían peor en los escenarios lunares simulados que en sus equivalentes terrestres, incluso cuando se ajustaban sus masas. Las ruedas se hundían más, la tracción disminuía y el deslizamiento aumentaba. “Reducir la masa del rover, en aislamiento, es insuficiente, a menos que el suelo se cambie para reflejar la menor gravedad”, explica el estudio.
Este hallazgo también desmonta una práctica muy común: el uso de suelos artificiales (simulantes lunares como GRC-1 o GRC-3) que se suponía replicaban el comportamiento del regolito lunar. Si bien se parecía al material en su composición y aspecto, no respondía igual bajo diferentes niveles de gravedad. Lo que parecía una buena idea era, en realidad, una fuente de error estructural.
Una nueva herramienta para predecir el movimiento real
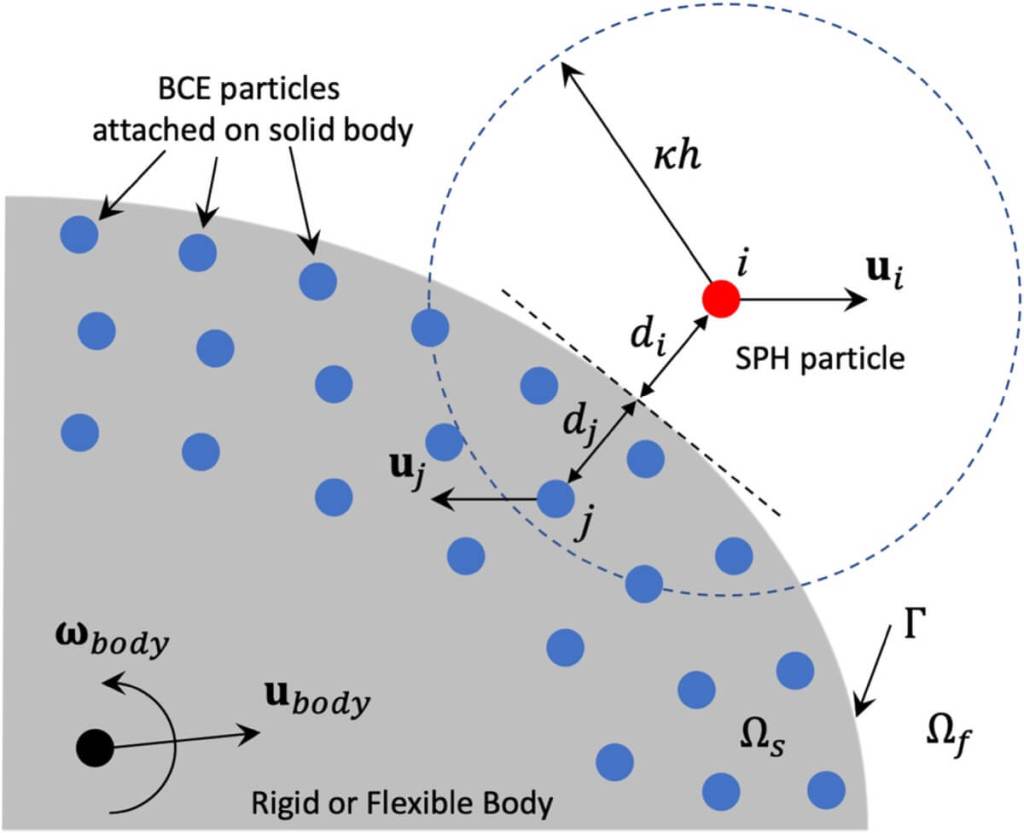
El equipo optó por una estrategia diferente. En lugar de seguir confiando en modelos empíricos como el Bekker-Wong–Janosi-Hanamoto (BWJH), decidieron usar un modelo físico continuo basado en ecuaciones que describen el comportamiento granular del terreno. Este enfoque, más exigente computacionalmente, se basa en la llamada metodología CRM (Continuous Representation Model) y fue implementado con técnicas de simulación por partículas (SPH).
La ventaja de esta simulación es que no requiere ajustar parámetros empíricos que solo funcionan bajo ciertas condiciones. Se alimenta de datos físicos reales, como densidad, ángulo de fricción o módulo de cizalladura. Eso permite estudiar cómo se comportará un rover al avanzar por un terreno de baja gravedad, sin necesidad de hacer suposiciones engañosas.
En pruebas comparativas, las simulaciones CRM reprodujeron con éxito los datos recogidos en el laboratorio físico de la NASA (SLOPE Lab), y luego mostraron cómo cambiaban esos resultados al cambiar solo la gravedad en el modelo. “El simulador revela errores de concepto en la forma en que se realiza hoy en día la prueba física de los rovers”.
Más allá del laboratorio: un nuevo paradigma para las misiones espaciales
Este estudio no es solo una corrección técnica. Es una llamada de atención. Porque implica que algunas de las decisiones de diseño tomadas en las últimas décadas —incluidas para misiones como Curiosity o VIPER— podrían haberse basado en pruebas poco fiables. Por ejemplo, un vehículo que en la Tierra puede subir una pendiente del 30 % con un 40 % de deslizamiento, en la Luna podría enfrentarse a un 80 % de deslizamiento en las mismas condiciones. Eso es crítico: después de cierto umbral de deslizamiento, el vehículo deja de avanzar y comienza a excavar su propia trampa.
También significa que el paradigma de pruebas basado en prototipos más ligeros necesita ser revisado. “El rover nominal que realizará una misión extraterrestre puede utilizarse en la Tierra para pruebas cuyos resultados pueden extrapolarse, mediante leyes de escala, para predecir su comportamiento en otros mundos”.
La implicación es clara: es mejor hacer pruebas con el rover completo y usar modelos físicos para ajustar los resultados, en lugar de manipular la masa o el terreno y asumir que las condiciones están bien representadas.
Del espacio a la Tierra: aplicaciones industriales
Aunque el descubrimiento surgió del contexto lunar, sus implicaciones se extienden a muchos otros campos. El motor de simulación Project Chrono, que permitió este avance, ya ha sido utilizado por organizaciones civiles y militares para analizar cómo se comportan vehículos en terrenos deformables: desde tanques del ejército hasta relojes mecánicos de precisión.
El desarrollo de esta herramienta ha sido posible gracias a colaboraciones con la NASA, el MIT y universidades internacionales. El software es de código abierto y gratuito para cualquier investigador o entidad que lo necesite, lo que amplía aún más su impacto. “Hay tipos de aplicaciones relevantes para la exploración planetaria donde nuestro simulador puede resolver problemas que ningún otro puede resolver” declaró Negrut.
Además, al ser modular y adaptativo, Chrono puede seguir evolucionando. El equipo ya está trabajando en incorporar funciones más avanzadas para futuros escenarios de exploración: excavación, construcción, desplazamientos sobre terreno alterado, entre otros.
¿Cómo no lo vimos antes?
La idea puede parecer evidente en retrospectiva. Si la gravedad cambia, no solo cambia el peso del objeto, sino también cómo responde el entorno. Pero durante mucho tiempo, los modelos utilizados eran derivados de experimentos en condiciones terrestres, y sus supuestos se daban por válidos.
Lo más paradójico es que los errores no surgieron por ignorancia, sino por confiar demasiado en modelos empíricos sin revisarlos a fondo. Esa confianza hizo que incluso los fallos visibles —como los rovers atascados— se interpretaran como accidentes puntuales, no como síntomas de una metodología defectuosa.
Gracias al trabajo de este equipo, hoy se cuenta con herramientas más fiables. Herramientas que no solo permitirán enviar vehículos más robustos y preparados al espacio, sino también mejorar la ingeniería de cualquier sistema que dependa del contacto con terrenos deformables.
Referencias
- Wei Hu, Pei Li, Arno Rogg, Alexander Schepelmann, Samuel Chandler, Ken Kamrin, Dan Negrut. A Study Demonstrating That Using Gravitational Offset to Prepare Extraterrestrial Mobility Missions Is Misleading. Journal of Field Robotics. https://doi.org/10.1002/rob.22597.
Cortesía de Muy Interesante
Dejanos un comentario: